1.SVM
支持向量机(support vector machines,SVM)是一种二分类模型 ,它将实例的特征向量映射为空间中的一些点,SVM 的目的就是想要画出一条线,以 “最好地” 区分这两类点,以至如果以后有了新的点,这条线也能做出很好的分类。SVM 适合中小型数据样本、非线性、高维的分类问题。
SVM 最早是由 Vladimir N. Vapnik 和 Alexey Ya. Chervonenkis 在1963年提出,目前的版本(soft margin)是由 Corinna Cortes 和 Vapnik 在1993年提出,并在1995年发表。深度学习(2012)出现之前,SVM 被认为机器学习中近十几年来最成功,表现最好的算法。
1.1 SVM 基本概念
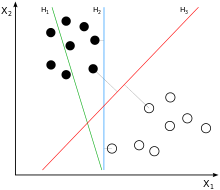
将实例的特征向量(以二维为例)映射为空间中的一些点,如下图的实心点和空心点,它们属于不同的两类。SVM 的目的就是想要画出一条线,以“最好地”区分这两类点,以至如果以后有了新的点,这条线也能做出很好的分类。
本质上就是找到一条直线或曲线能够最佳程度拟合数据点。
Q1:能够画出多少条线对样本点进行区分?
Q2:为什么要叫作“超平面”呢?
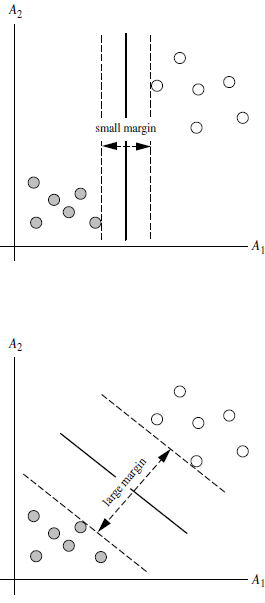
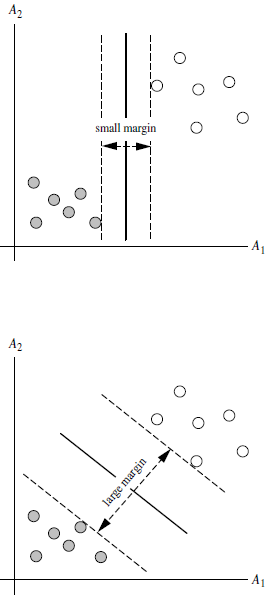
Q3:画线的标准是什么?/ 什么才叫这条线的效果好?/ 哪里好?
Q4:间隔(margin)是什么?
Q5:为什么要让 margin 尽量大?
Q6:支持向量是什么?
1.2 hard-margin SVM
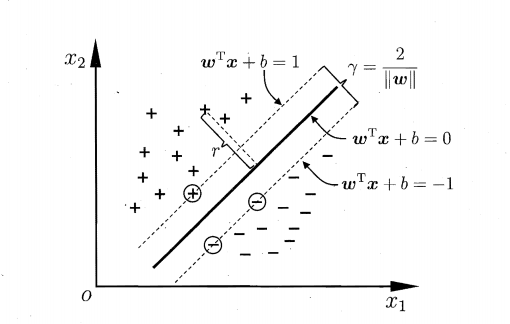
划分超平面可以定义为一个线性方程:w T X + b = 0 w^{T} X+b=0 w T X + b = 0
w = { w 1 ; w 2 ; … ; w d } w=\left\{w_{1} ; w_{2} ; \ldots ; w_{d}\right\} w = { w 1 ; w 2 ; … ; w d } d d d X X X b b b
只要确定了法向量 w w w b b b 1 ∣ ∣ w ∣ ∣ \frac{1}{||w||} ∣∣ w ∣∣ 1
利用一些数学推导,公式 y i ∗ ( w 0 + w 1 x 1 + w 2 x 2 ) ≥ 1 y_{i} *\left(w_{0}+w_{1} x_{1}+w_{2} x_{2}\right) \geq 1 y i ∗ ( w 0 + w 1 x 1 + w 2 x 2 ) ≥ 1
利用 Karush-Kuhn-Tucker (KKT)条件和拉格朗日公式,可以推出 MMH 可以被表示为以下“决定边界 (decision boundary)”
d ( X T ) = ∑ i = 1 l y i α i X i X T + b 0 d\left(X^{T}\right)=\sum_{i=1}^{l} y_{i} \alpha_{i} X_{i} X^{T}+b_{0}
d ( X T ) = i = 1 ∑ l y i α i X i X T + b 0
此方程就代表了边际最大化的划分超平面。
l l l X i X_i X i y i y_i y i X i X_i X i X T X^T X T a i a_i a i b 0 b_0 b 0 a i a_i a i
每当有新的测试样本X X X
1.3 SVM 应用实例
看一下 SVM 如何求出一个划分超平面。
我们已经知道了两个支持向量点(1,1)和(2,3),设置权重为w = ( a , 2 a ) w = (a , 2a) w = ( a , 2 a ) w T x + b = ± 1 w^Tx + b = ± 1 w T x + b = ± 1
a + 2 a + w 0 = − 1 , u s i n g p o i n t ( 1 , 1 ) a+2 a+w_{0}=-1, \quad using point (1,1)
a + 2 a + w 0 = − 1 , u s in g p o in t ( 1 , 1 )
2 a + 6 a + w 0 = 1 , u s i n g p o i n t ( 2 , 3 ) 2 a+6 a+w_{0}=1, \quad using point (2,3)
2 a + 6 a + w 0 = 1 , u s in g p o in t ( 2 , 3 )
由于 SVM 算法本身的实现非常复杂,所以不研究如何实现 SVM,而是采用 sklearn 库来学习 SVM 的应用问题。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 from sklearn import svmX = [[2 , 0 ], [1 , 1 ], [2 ,3 ]] y = [0 , 0 , 1 ] clf = svm.SVC(kernel = 'linear' ) clf.fit(X, y) print (clf)print (clf.support_vectors_)print (clf.support_)print (clf.n_support_) print (clf.predict([[2 ,0 ]]))
输出结果:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 SVC(C=1.0 , cache_size=200 , class_weight=None , coef0=0.0 , decision_function_shape='ovr' , degree=3 , gamma='auto_deprecated' , kernel='linear' , max_iter=-1 , probability=False , random_state=None , shrinking=True , tol=0.001 , verbose=False ) [[1. 1. ] [2. 3. ]] [1 2 ] [1 1 ] [0 ]
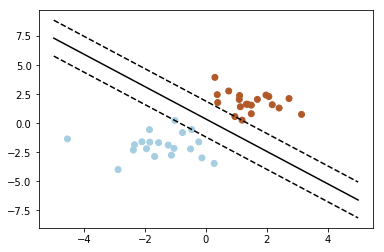
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 print (__doc__)import numpy as npimport pylab as pl from sklearn import svmnp.random.seed(0 ) X = np.r_[np.random.randn(20 , 2 ) - [2 , 2 ], np.random.randn(20 , 2 ) + [2 , 2 ]] Y = [0 ] * 20 + [1 ] * 20 clf = svm.SVC(kernel='linear' ) clf.fit(X, Y) w = clf.coef_[0 ] a = -w[0 ] / w[1 ] xx = np.linspace(-5 , 5 ) yy = a * xx - (clf.intercept_[0 ]) / w[1 ] b = clf.support_vectors_[0 ] yy_down = a * xx + (b[1 ] - a * b[0 ]) b = clf.support_vectors_[-1 ] yy_up = a * xx + (b[1 ] - a * b[0 ]) print ("w: " , w)print ("a: " , a)print ("support_vectors_: " , clf.support_vectors_)print ("clf.coef_: " , clf.coef_)pl.plot(xx, yy, 'k-' ) pl.plot(xx, yy_down, 'k--' ) pl.plot(xx, yy_up, 'k--' ) pl.scatter(clf.support_vectors_[:, 0 ], clf.support_vectors_[:, 1 ], s=80 , facecolors='none' ) pl.scatter(X[:, 0 ], X[:, 1 ], c=Y, cmap=pl.cm.Paired) pl.axis('tight' ) pl.show()
输出结果:
1 2 3 4 5 6 7 Automatically created module for IPython interactive environment w: [0.90230696 0.64821811] a: -1.391980476255765 support_vectors_: [[-1.02126202 0.2408932 ] [-0.46722079 -0.53064123] [ 0.95144703 0.57998206]] clf.coef_: [[0.90230696 0.64821811]]
2.核方法
2.1使用核方法的动机
在线性 SVM 中转化为最优化问题时求解的公式计算都是以内积(dot product)形式出现的,其中 ϕ ( X ) \phi(X)ϕ(X) 是把训练集中的向量点转化到高维的非线性映射函数,因为内积的算法复杂度非常大,所以我们利用核函数来取代计算非线性映射函数的内积。
以下核函数和非线性映射函数的内积等同,但核函数 K 的运算量要远少于求内积。
K ( X i , X j ) = ϕ ( X i ) ⋅ ϕ ( X j ) K\left(X_{i}, X_{j}\right)=\phi\left(X_{i}\right) \cdot \phi\left(X_{j}\right)
K ( X i , X j ) = ϕ ( X i ) ⋅ ϕ ( X j )
2.2常用的核函数(kernel functions)
h 度多项式核函数(polynomial kernel of degree h):
K ( X i , X j ) = ( X i , X j + 1 ) h K\left(X_{i}, X_{j}\right)=\left(X_{i}, X_{j}+1\right)^{h}
K ( X i , X j ) = ( X i , X j + 1 ) h
高斯径向基核函数(Gaussian radial basis function kernel):
K ( X i , X j ) = e − ∥ X i − X j ∥ 2 / 2 σ 2 K\left(X_{i}, X_{j}\right)=e^{-\left\|X_{i}-X_{j}\right\|^{2} / 2 \sigma^{2}}
K ( X i , X j ) = e − ∥ X i − X j ∥ 2 /2 σ 2
S 型核函数(Sigmoid function kernel):
K ( X i , X j ) = tanh ( k X i ⋅ X j − δ ) K\left(X_{i}, X_{j}\right)=\tanh \left(k X_{i} \cdot X_{j}-\delta\right)
K ( X i , X j ) = tanh ( k X i ⋅ X j − δ )
如何选择使用哪个 kernel ?
根据先验知识,比如图像分类,通常使用 RBF(高斯径向基核函数),文字不使用 RBF。
尝试不同的 kernel,根据结果准确度而定尝试不同的 kernel,根据结果准确度而定。
2.3核函数举例
假设定义两个向量:x = ( x 1 , x 2 , x 3 ) x = ( x 1 , x 2 , x 3 ) x = ( x_1 , x _2 , x_ 3 ) x = (x_1, x_2, x_3) x = ( x 1 , x 2 , x 3 ) x = ( x 1 , x 2 , x 3 )
定义方程:
f ( x ) = ( x 1 x 1 , x 1 x 2 , x 1 x 3 , x 2 x 1 , x 2 x 2 , x 2 x 3 , x 3 x 1 , x 3 x 2 , x 3 x 3 ) f(x)=\left(x_{1} x_{1}, x_{1} x_{2}, x_{1} x_{3}, x_{2} x_{1}, x_{2} x_{2}, x_{2} x_{3}, x_{3} x_{1}, x_{3} x_{2}, x_{3} x_{3}\right)
f ( x ) = ( x 1 x 1 , x 1 x 2 , x 1 x 3 , x 2 x 1 , x 2 x 2 , x 2 x 3 , x 3 x 1 , x 3 x 2 , x 3 x 3 )
核函数:K ( x , y ) = ( < x , y > ) 2 K(x,y)=(<x,y>) ^2 K ( x , y ) = ( < x , y > ) 2
假设:x = ( 1 , 2 , 3 ) , y = ( 4 , 5 , 6 ) x=(1,2,3),y=(4,5,6) x = ( 1 , 2 , 3 ) , y = ( 4 , 5 , 6 ) 不用核函数,直接求内积:
使用核函数:
K (x ,y )=(4+10+18)2=322=1024
同样的结果,使用 kernel 方法计算容易很多。而这只是 9 维的情况,如果维度更高,那么直接求内积的方法运算复杂度会非常大。
所以使用 kernel 的意义在于:
将向量的维度 从低维映射到高维
降低运算复杂度
3.相关概念补充
3.1性可区分和线性不可区分
能够用一条直线对样本点进行分类的属于线性可区分(linear separable),否则为线性不可区分(linear inseparable)。
以下三个例子,都是线性不可区分的,即无法用一条直线将两类样本点区分开。
而刚才的例子就是线性可区分的。
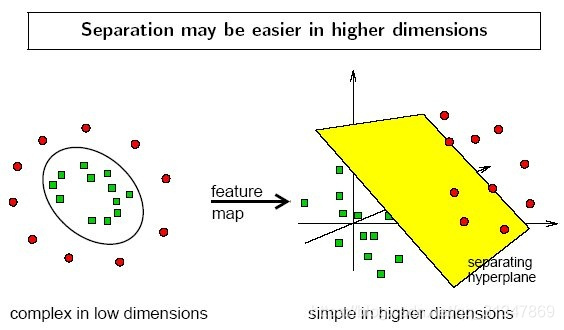
在线性不可分的情况下,数据集在空间中对应的向量无法被一个超平面区分开,如何处理?
两个步骤来解决:
利用一个非线性的映射把原数据集中的向量点转化到一个更高维度的空间中(比如下图将二维空间中的点映射到三维空间)
在这个高维度的空间中找一个线性的超平面来根据线性可分的情况处理
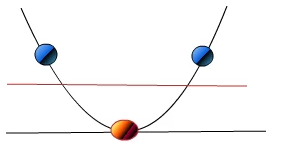
比如想要将红点和蓝点变成线性可分的,那么就将映射 y = x 变成映射 y = x^2
如何利用非线性映射将原始数据转化到高维空间中去?
例子:
将其转化到 6 维空间 Z 中去:
ϕ 1(X )=x 1,ϕ 2(X )=x 2,ϕ 3(X )=x 3,ϕ 4(X )=(x 1)2,ϕ 5(X )=x 1x 2,an d ϕ 6(X )=x 1x 3
新的决策超平面:d ( Z ) = WZ + b,其中 W 和 Z 是向量,这个超平面是线性的。
解出 W 和 b 之后,并且带入回原方程:
d ( Z ) = w 1 x 1 + w 2 x 2 + w 3 x 3 + w 4 ( x 1 ) 2 + w 5 x 1 x 2 + w 6 x 1 x 3 + b = w 1 z 1 + w 2 z 2 + w 3 z 3 + w 4 z 4 + w 5 z 5 + w 6 z 6 + b \begin{aligned}
&d(Z)=w_{1} x_{1}+w_{2} x_{2}+w_{3} x_{3}+w_{4}\left(x_{1}\right)^{2}+w_{5} x_{1} x_{2}+w_{6} x_{1} x_{3}+b=w_{1} z_{1}+w_{2} z_{2}+ \\
&w_{3} z_{3}+w_{4} z_{4}+w_{5} z_{5}+w_{6} z_{6}+b
\end{aligned}
d ( Z ) = w 1 x 1 + w 2 x 2 + w 3 x 3 + w 4 ( x 1 ) 2 + w 5 x 1 x 2 + w 6 x 1 x 3 + b = w 1 z 1 + w 2 z 2 + w 3 z 3 + w 4 z 4 + w 5 z 5 + w 6 z 6 + b
思考问题:
如何选择合理的非线性转化把数据转到高维空间中?
如何解决计算内积时算法复杂度非常高的问题?
3.2 SVM 可扩展到多分类问题
SVM 扩展可解决多个类别分类问题:
3.3 SVM 算法特性
训练好的模型的算法复杂度是由支持向量的个数决定的,而不是由数据的维度决定的。所以 SVM 不太容易产生 overfitting。