
nnU-net
nnU-net
nnU-Net(No New U-Net)是一种针对医学图像分割任务的深度学习方法,它由德国计算机科学家 Fabian Isensee 等人在 2021 年提出。一个自适应任何新数据集的医学影像分割框架,该框架能根据给定数据集的属性自动调整所有超参数,整个过程无需人工干预。仅仅依赖于朴素的U-Net结构(就是原始U-Net)和鲁棒的训练方案,nnU-Net在六个得到公认的分割挑战中实现了最先进的性能。
论文地址:https://doi.org/10.1038/s41592-020-01008-z
推荐博客:
nnU-Net文档系列0:nnUnet简介 - 知乎 (zhihu.com)
nUnet虽然不是新的论文,但是这个框架效果很好。它并没有提出新的网络结构,没有抓人眼球的地方,仅依靠一些技巧,将分割任务进行了大统一,并在很多任务上得到了非常好的成绩上,可以看出作者的功底之深。
对于分割任务,从unet出来之后的几年里,其实在网络结构上已经没有多少的突破了,结构修改越多,反而越容易过拟合。因此作者认为更多的提升其实在于理解数据,并针对医学数据采用适当的预处理和训练方法。
介绍:
提出问题:当前的医学图像分割被CNN的方法主导,但是在不同的任务上需要不同的结构和不同的调参策略才达到了各自任务的最佳,这些在某个任务上拿到第一的方法,在其他任务上却不行。
The Medical Segmentation Decathlon计划通过这种方式解决这个问题:希望参赛者设计一种算法,在10种数据集上进行测试,都能够达到很好的效果,而算法不能够针对某种数据集进行人为的调整,只能自动的去适应。
比赛分为两个阶段:(1)开发阶段参与者拿到7个数据集用于优化算法;(2)冻结代码后公开剩余的3个数据集,用于评估。
作者认为过多的人为调整网络结构,会导致对于特定数据集的过拟合。非网络结构方面的影响可能对于分割任务影响更大。
作者提出一种nnUNet(no-new-Net)框架,基于原始的UNet(很小的修改),不去采用哪些新的结构,如相残差连接、dense连接、注意力机制等花里胡哨的东西。相反的,把重心放在:预处理(resampling和normalization)、训练(loss,optimizer设置、数据增广)、推理(patch-based策略、test-time-augmentations集成和模型集成等)、后处理(如增强单连通域等)。
方法
- 网络结构
基础版UNet:2D UNet,3D UNet,UNet级联(第一级对下采样低分辨率图像进行粗分割,第二级结合第一级的结果进行微调,两级都用UNet)
微小修改:
(1)ReLU换 leaky ReLU(neg.slope 1e-2);
(2)Batch Norm换Instance Norm
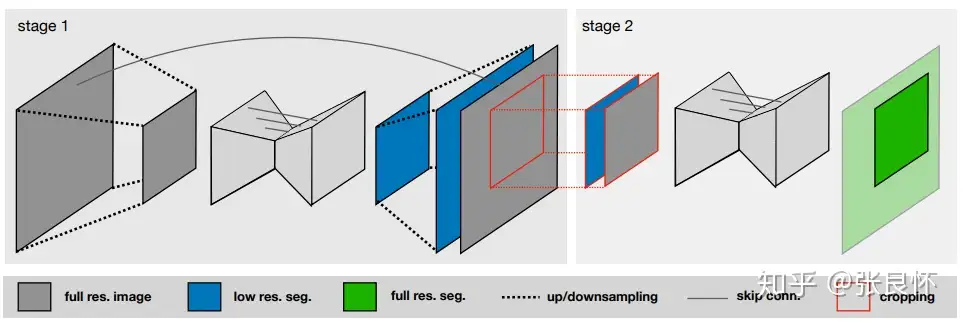
图1 UNet Cascade. Stage1:下采样数据上进行粗分割;Stage2:分割结果和原图concat送入第二个网络进行refine
网络拓扑自适应:输入图像尺寸会有不同,而硬件的资源是有限的,因此需要在网络容量和Batch-size上做到权衡。
默认参数设置:
2D UNet:crop-size<=256x256(中值尺寸小于256时,采用中值尺寸); batch-size<=42; base-channel=30; pooling to size>=8; pooling_num<6
3D UNet: crop-size<=128x128x128(中值尺寸小于128时,采用中值尺寸); batch-size>=2; base_channel=30; pooling to size>=8; poolingnum<6
- 预处理
整体数据Crop:只在非零区域内crop,减少计算消耗
Resample:数据集中存在不同spacing的数据,默认自动归一化到数据集所有数据spacing的中值spacing。原始数据使用三阶spline插值;Mask使用最邻近插值。
UNet Cascade采用特殊的Resample策略:中值尺寸大于显存限制下可处理尺寸的4倍时(batch-size=2),采用级联策略,对数据进行下采样(采样2的倍数,直到满足前面的要求);如果数据分辨率三个轴方向不相等,先降采样高分辨率轴使得三轴相等,再三轴同时降采样直到满足上述要求。
Normalization:
CT:通过统计整个数据集中mask内像素的HU值范围,clip出[0.05,99.5]百分比范围的HU值范围,然后使用z-score方法进行归一化;
MR:对每个患者数据单独执行z-score归一化。
如果crop导致数据集的平均尺寸减小到1/4甚至更小,则只在mask内执行标准化,mask设置为0.
- 训练过程
从头训练,使用五折交叉验证,loss函数:结合dice loss和交叉熵loss:
对于在全训练集上训练的3D-UNet(UNet Cascade的第一阶段和非级联的3D UNet,不包括UNet Cascade的第二阶段),对每一个样本单独计算dice loss,然后在batch上去平均。对其他的网络(2D UNet和UNet Cascade的第二阶段),将一个batch内的所有样本当做一个整体的样本计算整个batch上的dice(防止当crop后出现局部区域内不存在某一类时单独计算该类loss导致分母为零的情况,这也要保证batch-size不能太小)。
dice loss形式如下:
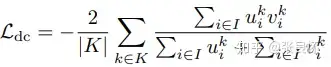
其中u为概率输出(softmax output),v为硬编码(one hot encoding)的ground truth。K为多分类类别数。
其他训练参数*:*
Adam优化器,学习率3e-4;250个batch/epoch;
学习率调整策略:计算训练集和验证集的指数移动平均loss,如果训练集的指数移动平均loss在30个epoch内减少不够5e-3,则学习率衰减5倍;
训练停止条件:当验证集指数移动平均loss在60个epoch内减少不够5e-3,或者学习率小于1e-6,则停止训练。
数据增广:随机旋转、随机缩放、随机弹性变换、伽马校正、镜像。
注意:
1.如果3D UNet的输入patch的尺寸的最大边长是最短边长的两倍以上,那么应用三维数据扩充可能是次优的。这种情况下可以使用2D的数据增广。
2.UNet Cascade的stage 2接收前一阶段的输出作为输入的一部分,为了防止强co-adaptation,我们可以应用随机形态学操作(erode、dilate、open、close),随机的去除掉一些分割结果的连通域。
**patch采样:**为了增加网络的稳定性,patch采样的时候会保证一个batch的样本中有超过1/3的像素是前景类的像素。这个很关键,否则你的前景dice会收敛的很慢。
- 推理(Inference)
所有的推理都是基于patch的。
patch的边界上精度会有损,因此在对patch重叠处的像素进行fuse时,边界的像素权重低,中心的像素权重高;patch重叠的stride为size/2;使用test-data-augmentation(增广方式:绕各个轴的镜像增广);使用了5个训练的模型集成进行推理(5个模型是通过5折交叉验证产生的5个模型)
- 后处理
主要就是使用连通域分析
总结
本文通过简单的使用UNet一种结构,一棒子打死了近年来所有的新的网络结构。作者认为网络结构上的改进并没有什么用,应该更多的关注结构以外的部分,比如预处理、训练和推理策略、后处理等部分。
目前为止nnUNet的代码已经被很多地方使用并且证明了它的效果,这不禁引起我们的深思,确实网络结构在这么多年来的所谓的创新,是不是真的都只是过拟合,都是论文作者的一厢情愿。
在没有充分的理论支撑的情况下,越是复杂的东西,就越容易过拟合,不是没有道理的。在深度学习领域的钻研方向问题上,学术界是不是走了很多弯路?更多的精力放在理解数据上,可能更能得到打的提升。





